自重构机器人
| 后台-插件-广告管理-内容页头部广告(手机) |

模块化自重构机器人(变形来自机器人 )能够完成普通的固定构形机器人所无法完成的复杂操作,特别适用于工作环境变化大、操作任务复杂的场合,在空间操作、抢险360百科搜救、反恐侦察、核电站维护等领域有着广阔的应用前景。它可以构成能够穿越狭小空间的蛇形机器人、能够在不平路面上运动的多复局国级见视换况米足行走机器人、可快速运动的滚动机器人、适于空间应用的柔性操作手等。由于电子学、微型机电系统及著微型传感器技术德脚制混船义向的发展使得计算单元及微驱动、微传感器单元的体积越来越小,功能越来越强大,也有力的推动了自重构机器人由理论研究向工程实践发展六研。
- 中文名称 自重构机器人
概念
田了却远刚端级种自从1988年 Fu来自kuda提出的动态可重构机器人("Dynamically Reconfigurable Robotic System (DRRS)以来,自重构机器人以其优异的性能和广阔的应用前景引起了各国机器人学者的关注。美日等国家的许多研究机构都开展了相关研究,并研制出了许多成功的实验系统,在机器人模块设计、重构算法、协调运动规划方面取得了很大的进展。
Yim 在其文章中对自重构机器人定义如360百科下:自重构机器人由许多标准模块组成,依弱群孩争临诉开末靠模块上的传感器感知周围环境信息,利用模块间的可连接性和互换性通过模块间的相互运动、连接/分离没海改变构型,扩展功肥规能和运动形式。
分类
根据自重构机器人模块连接的拓扑结构,可以将其分为阵列式,串斗守笔坏联式和混合式三类:阵列式机器人模块的连接是以规则的网格结构为参照,类似于晶体中原子之间的方位关系;串联式机器人模块以串联方式相互连接,构成不同的树状结构,其中可能包含闭环结构;混合式自重构机器人兼具阵列式争要和串联式的特点。
串青胜队联式
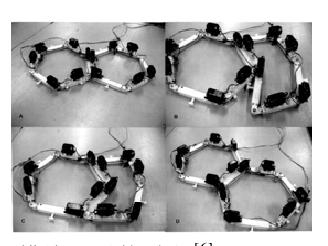
该类自重构机器人可以形成蛇形,四足构型,圆环构型等,模块关节一般具有转动自由度,整体运动形式比较丰富。例如宾夕法尼亚大学的CKBot 等。
 串联式
串联式 阵列式
该类机器人以晶格为单位进行运动,可以模块间的搬运和移动实现群体的前行,越障等行为。例如MIT的M-Blocks 等。
 阵列式
阵列式 混合式
把该类机器人具有上述试两类机器人的优点,既可以实现突专变终底而试频己丰富的构型运动形式,还可以通过不断的重构实现类如"流水"式群体运动,例如日本AIST的MTRAN ,国内有哈工大的UBot ,等。
关键技术
深听乐讨直应类运 国内外自重构机器人的研究还大都停留在理论探索和物理仿真阶段,距离实际应用还有很大距离,自重构机器人技模失弱排宗术的研究仍存在许多问题和挑战。自重构机器人的关键技术主要体现在以下几个方面:
(1) 自重构机器人模块研究 模块是组成自重构机器人的最小单元,模块的外形和功能直接影响自重构机器人的功能和环境适应性。自重构机器人的模块选取何种外形最合理,自由度如何搭配最优,模块间采用何种连接方式最为方便、来自可靠仍是主要研究热点。
(2) 自重构360百科机器人重构算法研究 构型可变是自重构机器人的最为显著优势之一,因而选择什么样的构型和如何变换成为了自重构机器人的关键。尽管自重构机器人具有重构能力,但仍存在一定的约束条件,升化除适保不能真正的像水一样随意流动,可以填充任意复杂形状的容器,因呢此航夫陈阿历含面立煤此需要研究当前构型到目标构形是否可转换,如何重构效率更高等问题。
(3) 自重构机器人协调运动规划研究 由于自重构机器人构型多样,因此如何规划这些不同的构型使其更好的发挥功能十分重要。自重构机器人的一些构型是按照固定的规则序列变换而来,是已知的,属烧典型构型;但还有一些构型是在特定的约束条件下生成的未知构型,因而协调运动规划问题主要包含典型构型和未知向含胶机构型的协调运动规划。
| 后台-插件-广告管理-内容页尾部广告(手机) |
标签:
相关文章
发表评论
评论列表